Cornell's robot 'soccer' players are world champs as they beat German team 15-0 in Stockholm final
By David Brand
They didn't sing the old Cornell University football song "See them plunging down to the goal," but the school's Big Red team became champions of world robot "soccer" today (Aug. 4, 1999) when they beat a highly regarded German team 15-0 in the finals in Stockholm, Sweden.
The event, called the Robot World Cup Initiative, familiarly known as RoboCup, pits teams of tiny but incredibly smart robots against each other. In the final, Cornell's team -- the first the university has fielded in the 3-year-old competition -- played the FU-Fighters from the Free University of Berlin in a match carried live on Swedish television and streamed live on the World Wide Web. One observer called the Cornell victory "a drubbing."
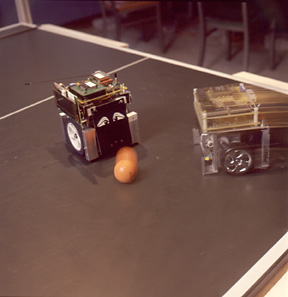
The Big Red was competing in the "small" league, in which robots are about 6 inches in diameter and the playing field is the size of a regulation table-tennis table.
RoboCup was created to foster research in robotics and artificial intelligence. Competitors must design robots that will operate as a team and build vision systems to enable the robots to detect the ball and distinguish between their own players and their opponents. The robots must also be able to decide on the best moves to put the ball into the other team's goal.
A team consists of five robots, communicating with their "mother" computer and with each other by radio. A video camera surveying the playing field tells the central computer where the players and the ball -- a golf ball -- are. Individual robots also can have on-board sensors. Once programmed, the robotic system is completely on its own, with no remote control by human operators.
The Cornell system uses two computers, one to process information from the video camera and another to decide on strategy based on the video information. The Cornell robots are about 7 inches tall and weigh about 2 kilograms. They are driven by a 17-watt motor powered by a 9-volt battery and can reach a speed of 2 meters per second in 0.7 seconds.
Unlike many robots in the competition, they have a spring-loaded "kicker" mechanism that can be used in special situations, in addition to bumping the ball. The goalie is a slightly different design, capable of moving rapidly from side to side.
Big Red's road to the finals began last Thursday with an opening game against a team fielded by the South Korean high-tech firm Robotis, winners of the South Korean championship and heavy favorites in RoboCup.
For the Cornell team even to be ready to play was a triumph of engineering resourcefulness because several pieces of luggage, including key pieces of equipment, had been lost by the airline. The team arrived in Stockholm Monday night, and Tuesday and Wednesday were spent in frantic phone calls to obtain technical specifications for the missing equipment, and searches throughout Stockholm to buy replacement parts.
On Wednesday night Raffaello D'Andrea, Cornell assistant professor of mechanical and aerospace engineering, who coaches the team, e-mailed: "We now have 12 hours before our first game ... and we have not tested the system, let-alone many individual components. It's going to be another long night..."
In the first game, against Robotis, Big Red was down 1-0 early in the first half. The students suspected something was wrong with the system until it was noticed that a chair near the field cast a shadow that was interfering with the robot goalie's vision. After the chair was removed, Cornell's defense was impenetrable, and the game ended 2-1 for Cornell.
Continuing in the early round-robin play, Cornell defeated Portugal 8-0 and New Zealand 33-0, advancing to the quarterfinals.
On Monday, Cornell routed a team from Temasek Engineering School in Singapore 20-1 to advance to the semifinals.
The semifinal game August 3 with another Singapore team from Ngee Ann Polytechnic was a barn-burner. Cornell took the lead early in the first half, but received three warnings and a yellow card for aggressive collisions with the other team's robots. This was inevitable, D'Andrea said, because Cornell's robots are more powerful. "Our higher speed settings have caused our players to sometimes skid slightly out of control, but more importantly, to push the other robots around in 50-50 situations. Due to our more powerful robots, we looked like the aggressors and were thus penalized," he explained. Cornell brought on a substitute for the player receiving a yellow card, to prevent a red card and mandatory expulsion. By the half the score was 2-2.
For the second half, the Cornell team decided to reduce the speed of its players, both to avoid further penalties and to give more control in passing. From there on Cornell advanced steadily, and the game ended Cornell 6, Singapore 2.
In preparation for the competition, Cornell developed two competing teams, known as Team Brazil and Team Italy. In a match played on the Ithaca campus in May, Team Brazil defeated Team Italy 4-0. A new final team was selected from the members of both teams, and the best features of both team's designs were incorporated into the final robots.
One reason the Big Red has been so successful, according to faculty adviser Bart Selman, associate professor of computer science, is that the team is made up of a mix of graduate and undergraduate computer science, mechanical engineering and electrical engineering students. "Most teams are just from computer science departments," Selman said.
Faculty advisers to the team, in addition to Selman, are Raffaello D'Andrea, Cornell assistant professor of mechanical and aerospace engineering, who coaches the team, Jin-Woo Lee, visiting lecturer in mechanical and aerospace engineering, and Norman Tien, assistant professor of electrical engineering.
The final RoboCup team was composed of Dennis Huang (team leader), Salman Qureshi, Mike Smullens, Thomas Karpati, Jason Oversmith, Alexander Lau, Alex Sepulveda, William Hegarty, Syaril Hussin, Charles Poon, Aris Samad-Yahaya, Christopher Lau and Aaron Delfausse.
Contributing to the design from Team Italy were David Hsu (team leader), Yooki Park, Scott Aaronson, Thibet Rungrotkitiyot, Ryan Hansen, Ray Chang, Harry Cuadrado, Lars Cremean, Ted Hwang, Livingston Cheng, Andrew Hoffman, Lance Hazer, Emily Winston and Stephen Chang-Chi Kao.
Related World Wide Web sites: The following sites provide additional information on this news release. Some might not be part of the Cornell University community, and Cornell has no control over their content or availability.
Media Contact
Get Cornell news delivered right to your inbox.
Subscribe