Robots that simulate life by walking with close-to-human efficiency described by researchers at Cornell, MIT and Delft
WASHINGTON, D.C. -- Robots that walk like human beings are common in science fiction but not so easy to make in real life. The most famous current example, the Honda Asimo, moves smoothly but on large, flat feet. And compared with a person, it consumes much more energy.
But researchers at Cornell University, the Massachusetts Institute of Technology (MIT) and Holland's Delft University of Technology have built robots that seem to more closely mimic the human gait -- and the Cornell robot matches human efficiency. The researchers' inspiration: simple walking toys that fascinated children in the 19th century.
"Already our robot seems to be at least 10 times more efficient than anybody else's," says Andy Ruina, Cornell professor of theoretical and applied mechanics. The Cornell robot consumes an amount of energy per unit weight and distance comparable to a human walker. In contrast, they estimate that the Honda Asimo uses at least 10 times as much energy as a human. The MIT and Delft robots, though not built deliberately to be energy-efficient, also use much less energy than the Asimo. More important, the researchers say, is that their robots provide a more realistic model of how humans walk.
Ruina, his former student Steven Collins, MIT postdoctoral researcher Russ Tedrake and Delft postdoctoral researcher Martijn Wisse describe their new robots in the latest issue of the journal Science (Feb. 18, 2005). They are presenting a press briefing on their work at 10 a.m. today (Feb. 17) at the annual meeting of the American Association for the Advancement of Science in Washington, D.C.
Cornell's robot equals human efficiency, Ruina explains, because it uses energy only to push off, while other robots needlessly use energy to absorb work, for example in moving the limbs forward more slowly than they would naturally swing under gravity power. "In other robots the motors are fighting themselves," he says.
Researchers at each of the three universities have built walking robots, differing slightly but based on the same principle. They are an extension of several years of research into "passive-dynamic walkers" that walk down a shallow slope, very much like simple walking toys that have been around since the 1800s and developed more scientifically starting in 1988. These downhill walkers were developed further in Ruina's lab, leading to a two-legged version with articulated knees built by Wisse during a visit to Cornell. Collins further refined that and then built the first Cornell powered model, while Wisse returned to Delft and developed other unpowered and powered robots.
For the robots being described in Science , the researchers at all three institutions have simply substituted small motors for gravity power. Ruina says the research followed the example of the Wright Brothers, who carefully researched gliders, then simply added a motor to achieve powered flight.
The robot work was done primarily to study the biomechanics of human locomotion, but it could have applications in practical robotics. Collins, now at the University of Michigan, already is applying some of what he has learned to the design of a powered prosthetic foot for amputees. "It's not exactly the same thing, but certainly the mode of thought comes from thinking about robots," he says. Information gained from studying walking robots should be of use to the rehabilitation community, he adds. The researchers note in their Science paper that gravity-powered walkers have been considered irrelevant to human walking by some because humans don't always walk downhill, but that these new machines demonstrate that there is nothing special about gravity as a power source.
Gravity-powered walking toys work by swaying from side to side, allowing first one foot and then the other to swing forward. Human beings minimize the swaying and bend their knees to allow the moving foot to clear the ground, and two of the three new robots do the same. All three robots have arms synchronized to swing with the opposite leg for balance.
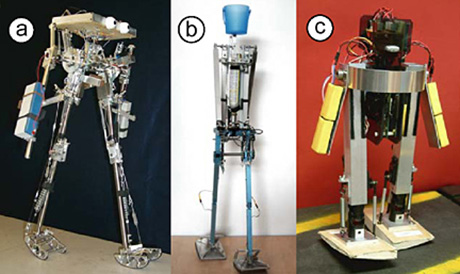
The Cornell robot supplies power to the ankles to push off. When the forward foot hits the ground, a simple microchip controller tells the rear foot to push off. During the forward swing of each leg a small motor stretches a spring, which is finally released to provide the push.
The Delft robot uses a pneumatic push at the hip, and the MIT robot uses electric motors that directly move the ankle. Control programs in the Cornell and Delft robots are extremely simple, while the MIT robot uses a learning program that allows the robot to teach itself to walk, which it can do in about 600 steps.
The fact these robots can walk with a humanlike gait with very simple control programs "suggests that steady-state human walking might require only simple control as well," the researchers say in their paper. "The success of human mimicry demonstrated here … strongly suggests an intimate relationship between body architecture and control in human walking."
The Science paper is titled "Efficient bipedal robots based on passive-dynamic walkers." Copies are available to reporters from the AAAS Office of Public Programs, (202) 326-6440, scipak@aaas.org . The work in Ruina's lab was funded primarily by a National Science Foundation (NSF) biomechanics grant. The work continues under an NSF robotics grant.
Get Cornell news delivered right to your inbox.
Subscribe