Hummingbird beak points the way to future micro machine design
By David Nutt, Cornell Chronicle
A Cornell research team has developed a new way to design complex microscale machines, one that draws inspiration from the operation of proteins and hummingbird beaks.
The group’s paper, “Bifurcation Instructed Design of Multistate Machines,” published Aug. 14 in Proceedings of the National Academy of Sciences. The lead author is Itay Griniasty, a Schmidt AI postdoctoral fellow in the lab of Itai Cohen, professor of physics in the College of Arts and Sciences.
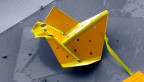
This metamaterial robot, which can morph into different shapes, is the type of machine Cornell researchers hope to build at the microscale using a new design paradigm inspired by the operation of proteins and hummingbird beaks.
Building smaller and smaller machines is not simply a matter of shrinking the components. While macroscopic machines are typically designed to be compartmentalized, dividing a task into small chunks and assigning each to a different piece of the machine, proteins – the quintessential microscopic machines responsible for much of biology – have a different design. Tasks are often achieved by coordinated motion of all of the protein’s components, making them more robust to the chaos of the microscopic world.
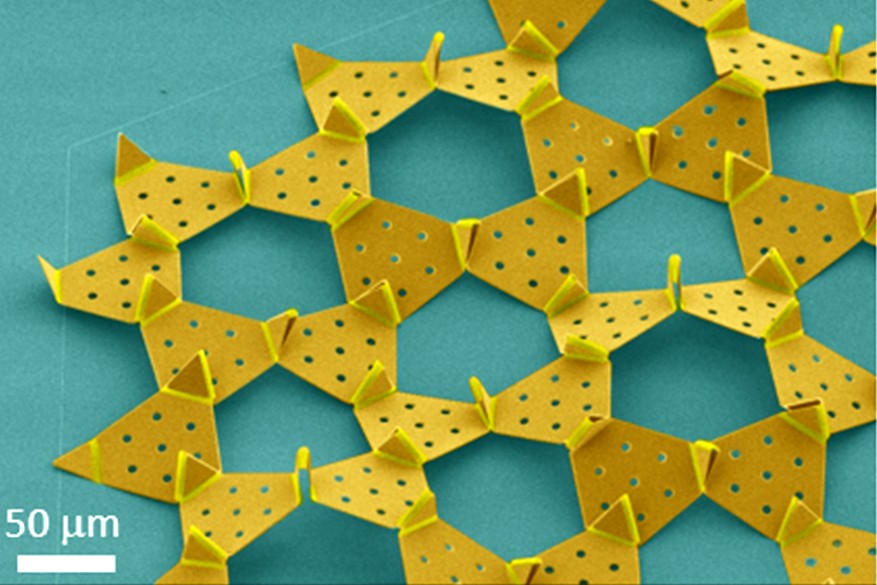
Previously, Cohen’s group has utilized origami principles to fabricate a stable of microscale devices, from self-folding structures to walking microrobots, that are innovative for their size but relatively basic in function. Adding functionality in origami sheets turns out to be a challenging task.
“The machines that we’ve made so far are very, very simple. But when we start thinking about how to increase the functionality in systems that are highly coupled, we started realizing that every time you move one part of the machine, all the other parts move,” Cohen said. “It’s maddening, because you can’t isolate anything, it’s all connected in these sheets. Then we started asking how does this get done in the microscopic world.”
A protein, they said, could be thought of as a machine hopping between states in response to small changes of a few parameters. The researchers were inspired by an example of this type of functionality at the macroscale: the hummingbird.
A 2010 study by Andy Ruina, the John F. Carr Professor of Mechanical Engineering, showed how a hummingbird’s beak can be “smoothly opened and then snapped shut through an appropriate sequence of bending and twisting actions by the muscles of the lower jaw.”
This system is explained by a mathematical idea called a cusp bifurcation, in which, depending on the forces exerted by the jaw muscles, the beak can have a single stable state, i.e., closed, or two stable states, both open and closed. The point at which the single stable state splits into two stable states is the cusp bifurcation.
The advantage of operating around a cusp bifurcation is that it provides a pair of key design features. The first is topological protection – which ensures consistency in a device’s performance, so that if the jaw muscles pull slightly differently, the beak can still open and snap shut. The second is a lever advantage, which ensures that the muscles only need to move a little bit to activate a large change in the beak. These are exactly the components necessary to achieve function at the microscale.
Cohen, Griniasty and their collaborators wondered if they could increase the number of states organized about a bifurcation from two – i.e., open and shut – to dozens or possibly hundreds. This extension would allow the design of machines that perform complex functions.
“Instead of compounding compartmentalized function, these capabilities would emerge from the entire object,” Griniasty said. “It’s dancing together.”
The researchers recruited Teaya Yang ’22 and Yuchao Chen ’19, both co-authors, to create a proof-of-concept macroscale magneto-elastic model with a butterfly bifurcation that allowed the system to snap or smoothly transition between three stable states. The model consisted of two panels, one of which moved in a plane while the other was free to rotate about a fixed hinge. Each panel was decorated with nine magnets that interacted with each other, creating complex interactions reminiscent of those found in proteins.
A central challenge, however, was finding a method to design magnetic patterns that would spur the desired bifurcation. Griniasty and David Hathcock, Ph.D. ’22 overcame the problem by developing an algorithm that built on the dynamical systems work of John Guckenheimer, the A.R. Bullis Professor Emeritus of Mathematics (A&S).
“If we tried to just guess these magnetic patterns, to generate multiple equilibria, we would run out of computing power,” Cohen said. “So Itay designed a very nice algorithm that simplifies the search.”
The next step will be to demonstrate the concept at the microscale.
“For a 100-micron machine, like the typical robots that we make, Itay calculated that we could achieve 20 separate states,” Cohen said. “That’s kind of what we envision could be made at the microscale, a machine where I use an actuator to move one of the panels, and the configuration of the entire machine could switch between 20 different configurations. You could have a machine that could, let’s say, locomote through fluid, or maybe do a complicated grasping action.”
Co-authors include Paul McEuen, the John A. Newman Professor of Physical Science (A&S) and James Sethna, the James Gilbert White Professor of Physical Sciences (A&S).
The research was supported primarily by the National Science Foundation DMREF program; the Sloan Foundation; the Kavli Institute at Cornell; the Air Force Office of Scientific Research; the Cornell Laboratory of Atomic and Solid State Physics; an NSF Graduate Research Fellowship; and the Eric and Wendy Schmidt AI in Science Postdoctoral Fellowship.
Media Contact
Get Cornell news delivered right to your inbox.
Subscribe